Cobotic Integration Study
- Degree programme: BSc in Mikro- und Medizintechnik
- Author: Ivan Fontana
- Thesis advisor: Prof. Dr. Gabriel Gruener, Prof. Dr. Sarah Dégallier Rochat
- Expert: Eng. Vincent Berthod
- Industrial partner: Eversys AG 1957 Ardon Suisse
- Year: 2019
La production à l'aide de la robotique collaborative fait toujours l'objet d'un vif débat au sein des entreprises, notamment parce que l'intégration n'est pas aussi facile qu'il n'y paraît. Dans ce projet, nous étudions les aspects techniques et commerciaux de l'intégration des cobots pour l'entreprise Eversys.
Motivation
Eversys produit des machines à café de haute qualité pour hôtels, restaurants et cafés (HoReCa). La production est entièrement réalisée en Suisse, en grande partie à la main. Grâce au grand succès commercial de ces produits, l'entreprise est en forte croissance. Pour soutenir cette expansion, Eversys construit une nouvelle usine à Sierre (VS Suisse) qui leur permettra de tripler leur production actuelle. Néanmoins, les coûts de production doivent rester compétitifs à l'échelle mondiale. Le but est de pouvoir maintenir la production en Suisse. Pour faire face a cette problématique, des solutions robotiques sont à l'étude.
Objectif
Analyser le potentiel de la cobotique dans la production et proposer une démonstration d'intégration pour une tâche dans le processus d'assemblage du châssis de la machine à café. La mise en œuvre de la solution doit être utilisée pour valoriser le potentiel de la cobotique et préparer un plan d'intégration plus grand, comprenant les aspects de business.
Methodes
Analyse LEAN Robotics
La robotique LEAN est une méthode que permet d'installer efficacement les robots dans les usines. On cherche à définir un standard qui n'a pas encore été atteint pour la robotique collaborative, en s'alignant sur la méthodologie de production LEAN déjà connue de nombreuses entreprises et en particulier utilisée par Eversys. Lors de l'analyse, chaque opération a été décomposée et étudiée en fonction des facteurs suivants : temps, distance (pièce - poste), complexité, ergonomie et qualité. Afin de trouver l'application qui apporte le plus d'avantages à la cellule et au collaborateur.
Conception démonstration
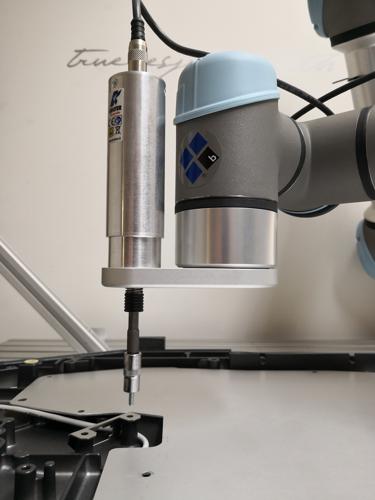
La tâche dévelopée pour la démonstration est de serrer les vis qui fixent les faces extérieures du châssis avec un robot. Cette application a été choisie afin d'éviter une opération très répétitive pour le collaborateur, améliorer la qualité et augmenter la capacité de production. Le robot est équipé d'un tournevis et son contrôleur est directement connecté a ce dernier. La programmation est écrite en langage URScript (langage officiel d'Universal Robots). En plus a été développée une HRI (Human Robot Interface) qui permet de choisir les fichiers script, de les envoyer et de démarrer la routine.
Résultats escomptés
Le robot est capable de serrer toutes les vis de manière sûre et précise, améliorant ainsi la capacité de production et la qualité du produit final. Le robot est facilement géré par l'employé via l'interface HRI. Le concept démontre la commodité et l'efficacité de la collaboration entre opérateur et robot, en donnant des directives et des méthodes pour l'intégration dans d'autres cellules de la production.