Realisation einer Cobotic-Anwendung zum Verpacken von Teilen
- Degree programme: BSc in Mikro- und Medizintechnik
- Author: Lucas Manuel Renfer
- Thesis advisor: Prof. Dr. Gabriel Gruener, Prof. Dr. Sarah Dégallier Rochat
- Expert: Tilman Treiber
- Industrial partner: Balluff GmbH 73765 Neuhausen, DE
- Year: 2019
In der Industrie ist Automatisierung nach wie vor ein wichtiges Thema. Jedoch sind nicht alle Prozesse geeignet, vollständig automatisiert zu werden. Aus diesem Grund ist eine Teilautomatisierung interessant. Auch die Zusammenarbeit zwischen Mensch und Roboter wird in Zukunft immer wichtiger. Dabei übernimmt ein Mensch komplexe Aufgaben, während ein Roboter simple Tätigkeiten übernimmt und damit den Menschen unterstützt und seine Produktivität steigert.
Ausgangslage
Die Kosten für manuell durchgeführte Arbeitsschritte steigen immer stärker. Eine vollständige Automatisierung eines solchen manuellen Arbeitsschrittes ist mit enormem Aufwand und hohen Kosten verbunden. Aus diesen Gründen ist eine Teilautomatisierung interessant. Die Lernfähigkeit eines Menschen kombiniert mit der Zuverlässigkeit und Effizienz eines Roboters ergibt ein flexibles, vielseitig anwendbares und fehlerarmes System. Der Mensch erledigt die komplexen Arbeitsschritte und versorgt den Roboter mit dem benötigten Material. Dieser übernimmt als unterstützende Kraft simple, sich wiederholenden Arbeiten.
Das Verpacken von Teilen ist beispielsweise ein Arbeitsschritt, welcher für solch eine Kooperation gut geeignet ist.
Ziel
Ziel dieser Anwendung ist, eine Kooperation zwischen Mensch und Roboter für das Verpacken von Teilen zu realisieren. Dabei müssen verschiedene Teile in der richtigen Menge in einen Plastikbeutel gepackt werden. Die zu verpackenden Teile werden vom Mitarbeiter bereitgestellt. Der Roboter erledigt die weiteren Arbeiten selbständig bis keine Teile mehr vorhanden sind. Eine Meldung signalisiert dem Mitarbeiter, dass weitere Teile benötigt werden. Der Mitarbeiter muss somit nur noch das Material bereitstellen und kann, während der Roboter arbeitet, eine komplexere Arbeit übernehmen. Dies steigert die Effizienz des Mitarbeiters und reduziert gleichzeitig die Fehlerquote beim Verpacken durch die Zuverlässigkeit des Roboters. Um zusätzlich die Flexibilität des Systems zu erhöhen, soll es dem Mitarbeiter möglich sein, dem Roboter Tasks beizubringen, um ihn für verschiedenste Arbeiten einsetzen zu können.
Vorgehen
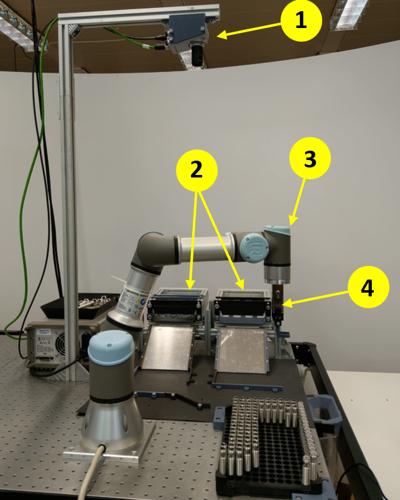
Das Material wird dem Roboter durch einen Mitarbeiter bereitgestellt. Anschliessend beginnt der Roboter dieses Material in den vorgesehenen Mengen in einen Plastikbeutel zu packen. Dieser Prozess wird dabei von einem Vision System überwacht, um sicher zu stellen, dass sich die korrekte Anzahl an Teilen im Plastikbeutel befindet. Der Roboter läuft immer solange genügend Material vorhanden ist. Der Output wird durch das gleichmässige Arbeiten des Roboters und durch eine reduzierte Fehlerquote erhöht.
Ausblick
Um die Flexibilität der Anwendung zu steigern kann ein Human-Robot-Interface eingesetzt werden. Dieses ermöglicht es einem Mitarbeiter mit wenigen Handgriffen das System auf neue Gegebenheiten einzustellen. Somit kann der gleiche Roboter für verschiedenen Tasks eingesetzt werden. Aufgrund der einfachen Integration eines neuen Tasks, werden teurere Programmierarbeiten überflüssig.