Smart and Dynamic Cobotic Workspace
- Degree programme: BSc in Mikro- und Medizintechnik
- Author: Christian Wyss
- Thesis advisor: Prof. Dr. Gabriel Gruener, Prof. Dr. Sarah Dégallier Rochat
- Expert: Dr. Sylvain Calinon
- Year: 2019
Bei einem «Smart and Dynamic Cobotic Workspace» geht es darum, einen Arbeitsplatz zu entwickeln, bei dem Mensch und Roboter im selben Arbeitsbereich gemeinsam eine Aufgabe erfüllen können. Untersucht wird, wie dynamische Pfadplaner mit Überwachungssystemen und einfachen Benutzerschnittstellen kombiniert werden könnten, um industrielle Aufgaben zu erledigen.
Ausgangslage
Damit Mensch und Roboter gleichzeitig an einer Aufgabe arbeiten können, ist ein kollaborativer Arbeitsraum nötig. In einem solchen Raum ändert sich die Umgebung durch das Eingreifen des Menschen und dessen Anwesenheit ständig. Es ist somit nicht mehr möglich, dass der Roboter fixe Trajektorien abfährt. Ein dynamischer Lösungsansatz soll verfolgt werden, bei dem die Trajektorien während dessen Ausführung fortlaufend aktualisiert werden. Solche Berechnungen bieten hardware- und softwaretechnische Herausforderungen, die gelöst werden müssen.
Ziel
Eine Benutzerschnittstelle soll erarbeitet werden, welche die Steuerung des Roboters vereinfacht. Dazu gehört die Umsetzung einer Bibliothek mit vordefinierten Bewegungsgrundlagen, dessen Basis einfache Bedienungskonzepte ermöglicht. Der Roboter soll ohne Programmierkenntnisse bedienbar sein. Veränderungen, die im Arbeitsbereich entstehen, werden automatisch erkannt und in einem laufenden Programm berücksichtigt.
Vorgehen
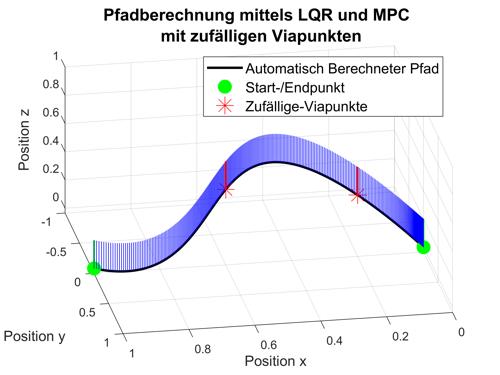
Ein dynamischer Pfadplaner, welcher optimale Trajektorien unter Zwangsbedingungen berechnet, wird mittels der Kontrollalgorithmen LQR und MPC (Linear Quadratic Regulator und Model Predictive Control) implementiert. Die Berechnungen werden soweit optimiert, dass der Pfad im Millisekunden-Takt aktualisiert werden kann. Dadurch kann beispielsweise einer Hand, die mit einem Leap Motion (einem Sensor-System) detektiert wird, ausgewichen werden. Da die Steuerung des Roboters und dessen Programmierung durch Personen durchführbar sein soll, die sich mit Programmierung nicht auskennen, wird für die Bedienung des Roboters auf ein Tablet gesetzt, bei dem geforderte Bewegungen und Anfahrpunkte bequem per Drag and Drop zusammengefügt werden können. Um die Umsetzung realitätsnah zu testen, werden die einzelnen Aspekte mit einem Use-Case aus der Industrie vorgeführt.