Kollaborative Montageanwendung
- Degree programme: BSc in Maschinentechnik
- Authors: Adrian Roger Hofer, Philipp Spring
- Thesis advisor: Prof. Roland Hungerbühler
- Expert: Dr. Dietmar Kramer
- Year: 2020
Das Zusammenspiel zwischen dreidimensionaler Werkstückerkennung, kollaborativem Roboter und flexiblem Greifsystem wird mittels Demoanlage veranschaulicht.
Ausgangslage
Kollaborative Roboter, flexible Greifsysteme und dreidimensionale Werkstückerkennung sind in aller Munde und aufkommende Technologien. Ihre gemeinsame Verwendung trifft man bisher selten an. Die Vorteile eines kombinierten Einsatzes werden mit der entwickelten Demoanlage aufgezeigt.
Herausforderungen
Nur wenn die drei komplexen Teilsysteme korrekt zusammenarbeiten, erfüllt die Demoanlage ihren Zweck. Deshalb mussten die Vorarbeiten, namentlich das Programmieren der Robotersteuerung (Java) und das Entwickeln eines Teileerkennungsalgorithmus (MATLAB), in nützlicher Frist geschehen. Erst dadurch blieb genügend Zeit, um die drei Teilsysteme kommunikativ zu verbinden und koordinativ aufeinander abzustimmen.
Resultat
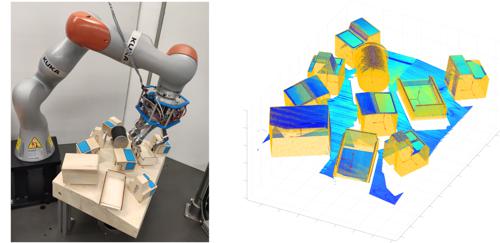
Die Demoanlage ist komplett aufgebaut und funktionsfähig. Die benutzende Person kann ein individuelles Lastwagenmodell montieren. Dazu kann sie aus drei unterschiedlichen Kabinen und Aufbauten auswählen. Das Vision-System erkennt die gewünschten Komponenten auf der 3D-Ablagefläche und übermittelt die berechneten Greifpositionen an den Roboter. Die Teile werden vom Roboter mit flexiblem Fingergreifer von der Ablage geholt (Abbildung links). Anschliessend montiert der Mensch das Modell kollaborativ mit dem Roboter.
Roboter
Zum Erreichen einer flexiblen Montage fährt der Roboter mit den Werkstücken in eine definierte Halteposition. Zur Feinpositionierung kann er gegriffen und in eine ergonomischere Zielposition geführt werden.
Vision
Das Vision-System erzeugt eine dreidimensionale Aufnahme. Der entwickelte Algorithmus erkennt die Teile und weist sie den entsprechenden CAD-Modellen zu. Aus diesen Informationen werden die Greifpositionen berechnet (Abbildung rechts).