RoboWalk, der sehnenbasierte Reharoboter
- Degree programme: BSc in Maschinentechnik
- Author: Michael Haldimann
- Thesis advisor: Prof. Dr. Kenneth James Hunt
- Expert: Christoph Heiniger
- Year: 2020
Der RoboWalk ist ein bewährtes Rehabilitationsgerät für Gangtraining und neurologische Rehabilitation. Um Behandlungsqualität und den Funktionsumfang des Gerätes zu steigern, wurde das System mit Sensoren und Antrieben ausgestattet. Eine Steuerung für das System fehlte bislang und wurde im Rahmen dieser Arbeit programmiert.
Ausgangslage
Der originale RoboWalk ist ein mechanisches Rehabilitationsgerät für das Laufband, welches ohne Elek-
tronik funktioniert. Mithilfe von Gummizügen, welche am Bein mit Manschetten fixiert werden, kann die Patientin/ der Patient gezielt beim Gehen unterstützt werden. Bei vorausgehenden studentischen Arbeiten am Institut IRPT wurde das System am bestehenden Laufband montiert und mit vier Antriebseinheiten ausgestattet. Eine Antriebseinheit besteht aus einer Steuerung, einem Motor und einer Seilwinde. Die Gummizüge wurden durch statische Seile ersetzt.
Ziel
Ziel der Bachelor-Thesis ist es, für den bestehenden Aufbau die Steuerung zu programmieren. Dies beinhaltet: Ansteuerung der Antriebe, Auswerten der Sensordaten, Implementierung einer Positionssteuerung und einer Impedanzregelung. Die Steuerung soll an einem Modell sowie an einer Probandin/ einem Probanden getestet werden.
Vorgehen und Ergebnisse
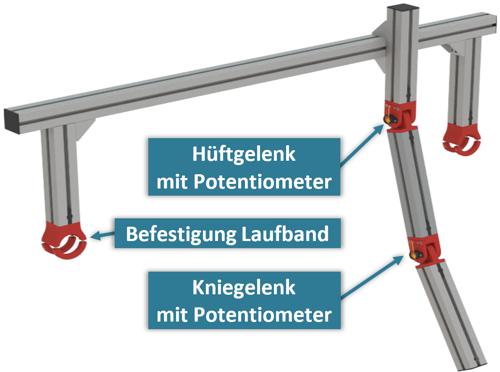
Ein mechanisches Modell eines Beines wurde entwickelt und gefertigt. Es dient zur Simulation eines Beines. Das Modell lässt sich rasch am Laufband montieren und demontieren. Zur Überprüfung der Bewegung verfügt es über präzise Potentiometer in den Gelenken. In jedem der vier Seile ist ein Seilkraftsensor eingebaut, um präzise die Seilkraft messen zu können. Eine Steuerung wurde in TwinCAT programmiert. Benutzer können zwischen einer Positionssteuerung und einer Impedanzregelung auswählen. Durch die Impedanzregelung kann die Patientin/ der Patient sanft in der Gangbewegung unterstützt und geführt werden. Verschiedene Parameter wie Geschwindigkeit und Geometrie sind frei wählbar. Die Bedienung erfolgt über ein Benutzerinterface, welches über den Webbrowser eines beliebigen Gerätes aufgerufen wird. Zur Überprüfung der Bewegung des Beines ist ein Bilderkennungsprogramm in Matlab programmiert worden, welches in einem Video das Hüft-, das Knie- und das Sprunggelenk verfolgt und die Bewegung auswertet. Inwiefern sich die programmierte Steuerung im Laborbetrieb bewährt, gilt es als nächsten Schritt zu testen.