Reharoboter mit Arm-Bein-Koordination
- Degree programme: BSc in Maschinentechnik
- Author: Philip Lukas Rufer
- Thesis advisor: Prof. Dr. Kenneth James Hunt
- Expert: Christoph Heiniger
- Year: 2020
Zur Rehabilitation von gehbehinderten Personen hat sich der Einsatz von Robotern durchgesetzt. Da der Therapieerfolg durch das natürliche Mitschwingen der Arme während dem Gangzyklus nachweislich verbessert wird, entwickelt die Berner Fachhochschule ein Reharoboter mit synchronisierter Arm-Bein-Koordination.
Ausgangslage
Der bereits konzipierte und gefertigte Roboter verfügt über 10 DC-Motoren der Firma Maxon, welche das Bewegen der Gelenke für Schulter-, Ellenbogen-, Hüft-, Knie- und Fussgelenke ermöglichen. Diese werden mittels einer übergeordneten speicherprogrammierbaren Steuerung (SPS) angesteuert und verfolgen im Betrieb das Gangmuster eines gesunden Menschen. Durch die implementierte Kraftregelung wird der Patient nicht starr geführt und kann eine gewisse Eigenleistung erbringen.
Ziel
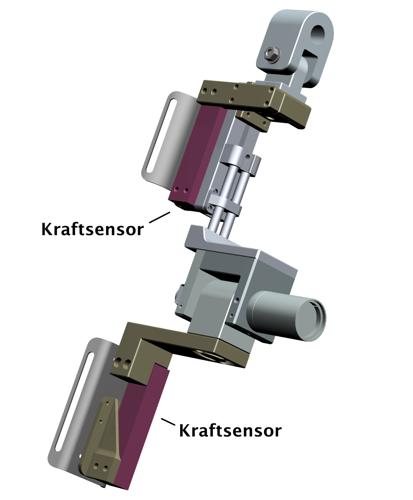
Der Roboter wird an den Armeinheiten mit Kraftsensoren erweitert, die eine genaue Evaluation der vom Patienten aufgebrachten Kräfte ermöglichen. Weiter wird die bestehende Kraftregelung mit einer Schwerkraftkompensation erweitert, die es ermöglicht das Eigengewicht des Roboters sowie des Patienten zu kompensieren. Dadurch kann der Patient seine Arme in jeder Winkelstellung fast ohne Kraftaufwand bewegen. Zusätzlich werden Notaus-Handtaster für den Patienten verbaut, die noch nicht vorhandene Benutzeroberfläche der Robotersteuerung erstellt und die Kraftregelung optimiert.
Resultat
Durch die entwickelte Gewichtskompensation kann das Gewicht von unterschiedlich schweren Patienten zuverlässig kompensiert werden. Die Kombination von Kraftregelung und Gewichtskompensation ermöglicht es während dem Betrieb mit Patienten das vorgegebene Gangmuster genauer zu erreichen. Weiter können nun die vom Patienten aufgebrachten Kräfte in Echtzeit aufgezeichnet und verarbeitet werden. Die Bedienung des Roboters erfolgt über die neu erstellte Benutzeroberfläche und der Patient hat nun die Möglichkeit einen Nothalt des Roboters auszulösen.