Entwicklung einer Laborplattform für die Regelungstechnik
- Degree programme: BSc in Mikro- und Medizintechnik
- Author: Marco Pascal Zaugg
- Thesis advisor: Prof. Dr. Thomas Niederhauser, Prof. Andreas Habegger
- Expert: Rico Zoss
- Year: 2020
Um Studierenden einen praktischen Einblick in Fragestellungen aus der Regelungstechnik zu verschaffen, soll eine neue Laborübung eingeführt werden. Die «Ball Balancing Platform» ermöglicht die Umsetzung von verschachtelten Regelkreisen. Die angestrebten Regelalgorithmen setzen dabei hohe Anforderungen an die Echtzeitfähigkeit des Systems. Diese Thesis umfasst die Software Implementierung eines geeigneten Echtzeitbetriebssystems.
Motivation
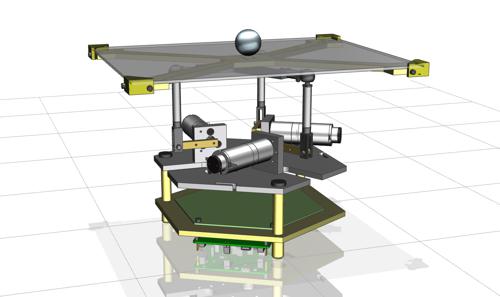
In den aktuellen Laborübungen werden die Regelkreise, für einen DC-Motor, in MATLAB/ Simulink designt, simuliert und auf einem dSpace System zeitdiskret implementiert. Eine Last Störung des Systems wird durch Bremsen des Motors, mittels eines Handschuhes simuliert. Der momentane Aufbau ist einfach gehalten und erlaubt dadurch keine adäquate Visualisierung sowie Analyse der Einflüsse auf das Regelsystem. Der DC-Motor soll durch die «Ball Balancing Platform» (siehe Abb. 1) ersetzt werden, welche die Performance einer mehrschleifigen Regelung durch eine balancierende Kugel visualisiert. Die neue Plattform wird es den Studierenden erlauben, (mehrschleifige) Regler unterschiedlicher Komplexität von der Theorie in die Anwendung zu überführen und dabei steigende Anforderungen an das Echtzeitsystem zu berücksichtigen. Das Ziel dieser Thesis ist es, die Firmware des Systems zu entwickeln, zu implementieren und zu testen. Den Studierenden soll es möglich sein, mit einem MATLAB/ Simulink Modell einen Regler zu designen, der anschliessend in die zur Verfügung gestellte Firmware eingebunden wird. Weiter sollen die Prozessdaten des Systems aufgezeichnet und visualisiert werden.
Systembeschreibung
Die «Ball Balancing Platform» ist ein klassisches Mechatronisches-System. Es besteht aus Eingabe-, Verarbeitungs- sowie Ausgabeeinheiten. Die Eingabe erfolgt mittels resistiven Touchpanel, welches die Position der Kugel ermitteln kann. Zusätzlich werden die Positionen und der Stromverbrauch von jedem der 3 benötigten DC-Motoren (Maxon DCX22S GB KL 24V) gemessen. Die Verarbeitung übernimmt ein leistungsstarker Mikrocontroller (STM32 H743ZI2). Dieser wird eingesetzt, um die verschiedenen Parameter der mehrstufigen Regelung zu verarbeiten und dabei die Winkelpositionen für die DC-Motoren zu berechnen. Die Ausgabe erfolgt über H-Brücken, welche die Motoren ansteuern. Über eine mechanische Kopplung werden die Winkel der Plattform eingestellt.
Vorgehen
In einem ersten Schritt wurden die maximalen Zykluszeiten zur Datenerfassung, - verarbeitung und -ausgabe des Mikrocontroller untersucht. Davon abgeleitet erhalten wir eine maximale Abtastfrequenz von 180 kHz. Aufgrund der Systemkomplexität und dem Wunsch nach einfacher Erweiterbarkeit, haben wir uns für ein Betriebssystem basiertes Konzept entschieden. Weiter fordert die Regelung ein deterministisches Verhalten sowie das Erfassen von Echtzeitanforderungen. Als Folge der genannten Anforderungen haben wir uns für das Echtzeitbetriebssystem FreeRTOS entschieden. Auf dieser Basis wird die Firmware aufgebaut.
Ausblick
Als nächster Schritt gilt es, das Softwarekonzept zu erstellen. Hierzu werden die Tasks definiert sowie die Taskinterkommunikation festgelegt.
Durch einen modularen Aufbau des Systems soll erreicht werden, dass ein einfaches Portieren auf einen anderen Controller ermöglicht wird.