Autonomous Underwater Ground Image Stitcher
- Degree programme: BSc in Informatik
- Authors: Julian Haldimann, Manuel Gasser
- Thesis advisors: Prof. Marcus Hudritsch, Prof. Dr. Reto Koenig
- Expert: Dr. Harald Studer
- Year: 2021
Beim AUGIS (Autonomous Underwater Ground Image Stitcher) handelt es sich um ein autonom fahrendes Boot, welches ein Orthofoto eines Bereiches des Seeboden erstellen kann. Mit den Aufnahmen sollen später die Fundstätten der Pfahlbauer untersucht und dokumentiert werden. So können die Veränderungen der Fundstätten kostengünstiger und geringerem Aufwand festgehalten werden.
Ziel der Arbeit
Im Rahmen dieser Arbeit soll ein Boot und dessen Ansteuerung erstellt werden, welches vorgegebene Routen autonom und möglichst genau abfahren können soll. Dabei wird mit einer Kamera unter Wasser der Seeboden aufgezeichnet. Die Kontrolle des Bootes sowie das Kreieren von Routen soll über eine Webseite möglich sein.
Umsetzung und Technologien
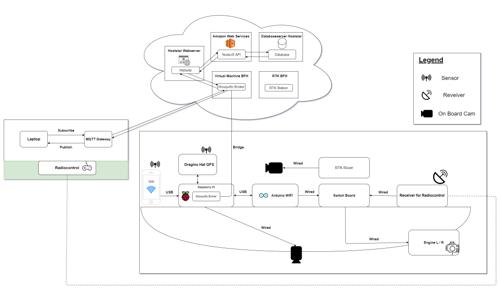
Für das Boot wurde ein Bausatz eines Futterbootes verwendet, bei welchem wir unsere Elektronik für die Ansteuerung eingebaut haben. Das zentrale Element für die Steuerung des Bootes ist ein Raspberry-Pi. Dieser übernimmt sämtliche Sensorauswertungen und Berechnungen für das autonome Fahren. Die Ansteuerungswerte werden an einen Arduino übermittelt, welcher für die Motorensteuerung zuständig ist. Die Kommunikation zwischen allen Geräten und Sensoren erfolgt über einen MQTT-Broker. Die gesamte Kontrolle des Bootes erfolgt über eine von uns erstellten Webseite. Ebenfalls können auf dieser Routen geplant und aufgezeichnet werden. Damit die aktuelle Lage des Bootes bekannt ist, wird die Position auf einer Karte markiert und ein Live-Kamerabild angezeigt. Um eine präzise GPS-Position zu erhalten, verwenden wir die in einer anderen Bachelorarbeit bereitgestellte RTK-Technologie und haben einen RTK-Rover auf dem Boot integriert.
Ergebnisse
Als Resultat dieser Arbeit kann unser Boot ohne Hilfe einer Fernsteuerung, autonom vorgegebene Richtungen einschlagen und Strecken gerade abfahren. Auch ist es jederzeit möglich die Kontrolle mit der Fernsteuerung zu übernehmen. Während der Fahrt wird der Seeboden live auf unserer Webseite angezeigt und als Aufzeichnung gespeichert.