From GNSS to Real-Time Kinematik
- Degree programme: BSc in Informatik
- Author: Philippe Leiser
- Thesis advisor: Prof. Dr. Reto Koenig
- Expert: Thomas Jäggi
- Year: 2021
Real-Time Kinematik beschreibt die Zentimetergenaue Positionsbestimmung eines GNSS-Empfängers. Dafür muss die sogenannte Base-Station (fix) dem Rover (beweglich) laufend Korrekturdaten übermitteln. Dies kann beispielsweise über Mobilfunk, oder über das Internet mit dem sogenannten Ntrip-Protokoll geschehen. Was GNSS und RTK alles beinhaltet und ob es möglich ist ein eigenes RTK-Setup auf die Beine zu stellen, versuchte ich in meiner Bachelorthesis herauszufinden.
Kontext
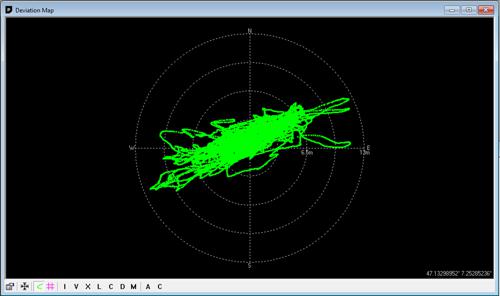
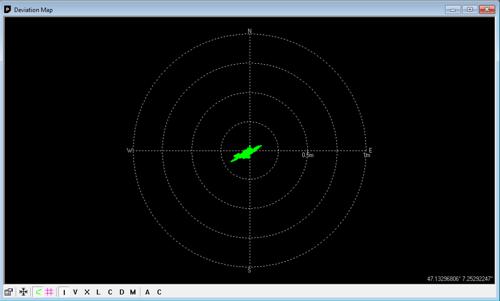
Unter dem Oberbegriff GNSS finden sich Positionierungssysteme verschiedener Länder. Dabei ist GPS (USA) das bekannteste und wird Umgangssprachlich gerne auch als Synonym von GNSS verwendet. Ganz egal welches System schlussendlich verwendet wird, die Genauigkeit der Positionsbestimmung beträgt im besten Fall 5-10m. Das ist völlig ausreichend, wenn es darum geht die Koordinaten eines Menschen auf der Erde bestimmen zu können. Jedoch reicht diese Genauigkeit nicht um bspw. Erntefahrzeuge automatisch Felder abfahren zu lassen. RTK, kurz für Real-Time Kinematic, ist ein Verfahren der differentiellen Positionsbestimmung und ist in der Lage mithilfe von Korrekturdaten die Genauigkeit auf 1-2cm zu verbessern.
Ziele
Das Ziel dieser Bachelorthesis ist es, das Verfahren des RTK genauer anzuschauen und besser zu verstehen. Nicht zuletzt war das Ziel dieser Thesis auch, einen eigenen RTK-Korrekturdienst an der BFH bereitstellen zu können. Somit kann bei Bedarf auf einen hauseigenen, zentimetergenauen Positionierungsdienst zurückgegriffen werden. Ein weiterer wichtiger Aspekt war es, herauszufinden, welche Technologien und Komponente generell hinter GNSS stecken und wie sie eingesetzt werden.
Ergebnisse
Schlussendlich ist es mir während meiner Arbeit gelungen mithilfe eines selbstgeschriebenen Python-Programms die Korrekturdaten der GNSS-Base-Station an den Rover so zu übertragen, dass er erfolgreich einen "RTK-Fix" meldete und somit eine Genauigkeit von wenigen Zentimetern erreichte. Die Übertragung der Daten geschieht über das offene MQTT-Protokoll über welches es ebenfalls möglich ist, die Komponenten zu konfigurieren.
Zukunft
In der Zukunft soll die Base-Station und der Rover in der Bachelorthesis "AUGIS" von Julian Haldimann und Manuel Gasser Anwendung finden. Dort sollen die Komponenten dazu beitragen, ein autonomes Boot auf dem Wasser auf Kurs zu halten. Weiter ist es denkbar, dass eine Base-Station an der Berner Fachhochschule fest verbaut wird, sodass diese zur hochpräzisen Positionsbestimmung verwendet werden kann, bestünde die Nachfrage dazu.