Développement d'une télécommande pour la "Ball Balancing Platform"
- Degree programme: BSc in Mikro- und Medizintechnik
- Author: Simon Pierre Gremaud
- Thesis advisors: Prof. Dr. Thomas Niederhauser, Prof. Andreas Habegger, Fabio Modica
- Expert: Rico Zoss
- Year: 2021
La division microtechnique et technique médicale a créé une plateforme de balancement de balle pour l’apprentissage de la technique de régulation aux étudiants. Le but de cette thèse est de développer une télécommande qui permet à l'utilisateur d'activer les différents modes de régulation à travers une interface graphique. Un de ces modes permet notamment de régler la position de la balle sur le plateau en temps réel.
Introduction
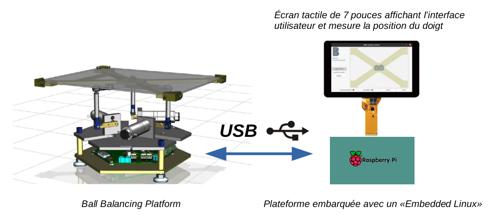
La "Ball Balancing Platform, (BBP)" régule la position d'une balle sur son plateau. Le but de cette régulation est de changer l'angle du plateau de façon à compenser les perturbations sur la balle. La télécommande développée dans cette thèse permet à l'utilisateur de changer la position de cette balle en temps réel à l'aide d'un écran tactile. Le but du temps réel est de montrer la vitesse de la régulation et de donner l'impression à l'utilisateur que il n'y a pas de délai entre la position du doigt sur l'écran et celle de la balle sur la plateforme.
Cette interface utilisateur doit être simple, fonctionnelle et portable.
Buts
Le but est de créer un software avec une interface utilisateur qui sera installée sur une plateforme embarquée. Cette plateforme sera connectée à un écran tactile et enverra les différentes informations à la "BBP".
Cette plateforme embarquée utilisera le noyau GNU/Linux comme système d'exploitation, ce qui permettra au software de la télécommande d’exécuter les tâches en "temps réel". Ce design de produit est appelé "Embedded Linux"
Méthodes
La première partie de ce travail consiste à étudier le système actuel et choisir les composants hardware et software les mieux adaptés au système et au cahier des charges. Des mesures sont effectuées pour déterminer si le protocole USB envoie les données à une vitesse suffisante, et si ce protocole est compatible avec tous les éléments hardware.
Ensuite le logiciel est implémenté et testé pour vérifier son fonctionnement.
Résultats
La télécommande sera composée d'un Raspberry Pi raccordé à un écran tactile de 7 pouces qui affichera l'interface utilisateur. Le software est réalisé avec le langage de programmation C et utilise la bibliothèques graphique GTK+ . Le Raspberry Pi communique avec la "BBP" avec le protocole USB. À travers ce câble passe les informations de la position de la balle, de l'angle du plateau, mais également les informations sur l'état de la plateforme et les mesures des trois moteurs (ces moteurs servent à changer l'angle de la plateforme).
Un algorithme d'interpolation est utilisé pour lisser la mesure de la position du doigt et rendre le chemin plus fluide. Cette interpolation est réalisée par le software et elle est de type "Cubic Spline".