RoboWalk Sehnenbasierter Reha-Roboter
- Degree programme: BSc in Maschinentechnik
- Author: Etienne Nico Ingold
- Thesis advisor: Juan Fang
- Expert: Dr. Felix Scheuter
- Year: 2021
Der RoboWalk, ein anerkanntes Rehabilitationsgerät für Gangtraining und neurologische Rehabilitation, funktioniert rein mechanisch. Für eine Erhöhung der Behandlungsqualität wurde das System mit Sensoren, Antrieben und einer Steuerung ausgestattet. In dieser Arbeit wurden nun die Antriebe überarbeitet und die Steuerung mit einer Solltrajektorie erweitert.
Ausgangslage
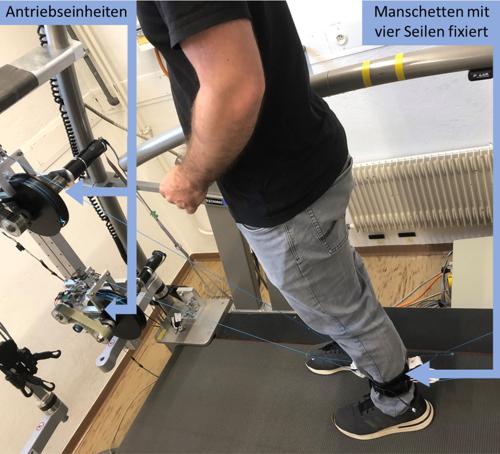
Der RoboWalk der Firma h/p/cosmos ist ein mechanisches Rehabilitationsgerät ohne Elektronik für das Laufband. Der Rehabilitationseffekt entsteht mit Gummizügen, welche mit Manschetten am Bein fixiert werden und so die Patientin/ den Patienten aktiv beim Gehen unterstützen. Das Institut IRPT hat in vorausgehenden studentischen Arbeiten das System an einem vorhandenen Laufband montiert und mit vier Antriebseinheiten ausgestattet. Ausserdem wurde eine Steuerung für die Antriebseinheiten erstellt.
Ziel
Das Ziel dieser Bachelorthesis ist das Verbessern der aktuellen Antriebseinheiten mit anschliessender Implementation an der aktuellen Anlage. Ausserdem soll für die Gangbewegung eine Solltrajektorie der Kraft der einzelnen Antriebseinheiten erstellt werden. Zusammen mit einem bereits existierenden Regler sollen danach Tests mit Probandinnen und Probanden durchführbar sein.
Vorgehen und Ergebnisse
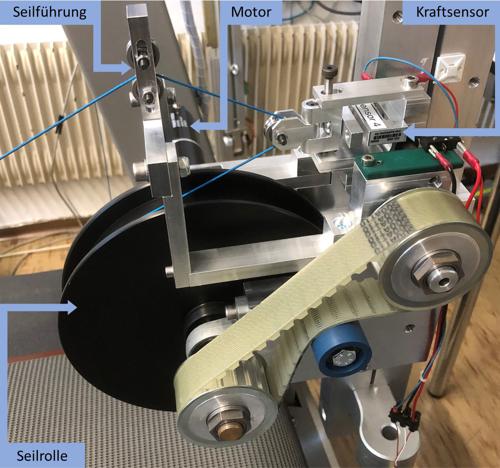
In einem ersten Schritt wurden die aktuellen Antriebseinheiten analysiert und getestet, um mögliche Mängel und Verbesserungsmöglichkeiten zu erkennen. Die Verbesserungen wurden anschliessend in entsprechende Zeichnungen umgesetzt und der Werkstatt für die Herstellung übergeben. Ein erstes Modell wurde getestet und nach einen positiven Ergebnis wurden weitere drei Antriebseinheiten am RoboWalk installiert.
In einem nächsten Schritt wurde für jede Antriebseinheit eine Simulation von der Solltrajektorie der Kraft mit der Hilfe von MATLAB erstellt. Es wurden zwei Simulationen erstellt, die erste Simulation ist eine Kreisbewegung des Fussgelenkes und die zweite Simulation wurde für eine Gangbewegung erstellt.
In einem letzten Schritt sind die Ergebnisse der Simulation in die aktuelle Programmierung des RoboWalk implementiert und für die Weiterarbeit getestet worden.