Radar für das FIT E-Bike System
- Degree programme: BSc in Elektrotechnik und Informationstechnologie
- Author: Nicolas Zaugg
- Thesis advisor: Prof. Dr. Rolf Vetter
- Expert: Dr. Friedrich Heitger
- Industrial partner: Biketec GmbH Huttwil
- Year: 2021
Bei E-Bikes kommen Rückspiegel zum Erkennen von Fahrzeugen hinter dem E-Bike zum Einsatz. Diese sollen die Sicherheit des Lenkers erhöhen. Jedoch ist das Abschätzen der Distanz und der Geschwindigkeit durch den Spiegel nicht immer einfach. Darum wurde in diesem Projekt ein Prototyp eines Radars entwickelt. Dieses kann Fahrzeuge hinter dem E-Bike erkennen und den Benutzer direkt am Display über Distanz und Geschwindigkeit des herannahenden Fahrzeuges informieren.
Ausgangslage
Um den Fahrer direkt am Display des E-Bikes über von hinten herannahende Fahrzeuge informieren zu können, wird das Radar in das E-Bike System FIT (FLYER Intelligent Technology) der Firma Biketec GmbH integriert. Nähert sich ein Fahrzeug schnell, kann so eine Warnung an den Fahrer gemacht und dadurch die Sicherheit beim E-Bike fahren verbessert werden. In vorangehenden Projektarbeiten wurde ein Konzept für die Radarsignalverarbeitung in einer Hochsprache am Computer umgesetzt. Ebenfalls wurde eine Leiterplatte mit der Radar-Elektronik entwickelt, welche in der Abbildung 1 zu sehen ist.
Umsetzung
Bei einem Radar werden Funkwellen von einer Antenne ausgesendet. Sobald die Wellen auf ein Objekt treffen, wird ein Teil der Wellen reflektiert und gelangt mit einer zeitlichen Verzögerung zurück zum Sender. Die reflektierten Wellen können dort mit einer Antenne empfangen werden. Anschliessend werden die empfangenen Wellen digitalisiert und mittels digitaler Signalverarbeitung ausgewertet. Nach diesem Prinzip wurde auch das FIT E-Bike Radar entwickelt. In der Bachelorarbeit wurde die Software zum Generieren des auszusendenden Signals und zum Digitalisieren der reflektierten Wellen umgesetzt. Dazu wurden die einzelnen Komponenten auf der Leiterplatte angesteuert. Anschliessend wurden Algorithmen zur digitalen Signalverarbeitung auf dem Controller der Elektronik realisiert. Diese Algorithmen wurden mit der Umsetzung in der Hochsprache verifiziert. Einer der Algorithmen ist der Range-Doppler Algorithmus, der zur Bestimmung der Distanz und der Geschwindigkeit eines Fahrzeuges verwendet wird.
Resultate und Ausblick
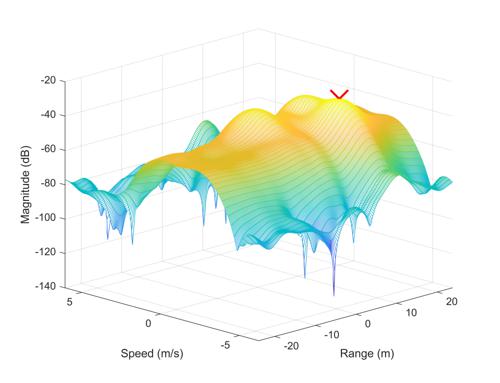
Das Resultat des programmierten Range-Doppler Algorithmus ist ein Oberflächendiagramm, auch Range-Doppler Map genannt. Eine typische Range-Doppler Map ist in der Abbildung 2 dargestellt. Darin ist ein lokales Maximum in einer Distanz von 10 m und einer Geschwindigkeit von 2.5 m/s (9 km/h) zu sehen. Dieses Maximum ist das zu erkennende Fahrzeug hinter dem E-Bike. In einem weiteren Schritt geht es darum, das Erkennen der Fahrzeuge in dieser Map auf dem Controller umzusetzen und die Resultate an das Display des E-Bikes zu übertragen und dort darzustellen.