Energieversorgung und Energiemanagement eines unbemannten Forschungsbootes
- Degree programme: BSc in Automobil - und Fahrzeugtechnik
- Author: Sandro Wüthrich
- Thesis advisor: Prof. Peter Affolter
- Year: 2021
Diese Arbeit ist Teil des Projekts "Wall-B", welches das Ziel hat, mit einem unbemannten Forschungsboot den Bielersee zu erkunden. Es soll möglich sein, Abfall und weitere verborgene Gegenstände unter Wasser zu erkennen und auf einer Karte zu markieren. Im Rahmen dieser Arbeit wird der Energiehaushalt über einen Mikrocontroller, der als Co-Prozessor dient, verwaltet. Im Ruhemodus werden nur noch die wichtigsten Funktionen genutzt, was den Energiebedarf stark reduziert.
Aufgabenstellung
Das Ziel des gesamten Projektes ist es, ein per Leitstelle gesteuertes unbemanntes Forschungsboot zu bauen, das Sensor- und Bilddaten übertragen kann. Im Rahmen dieser Arbeit werden folgende Aufgabengebiete behandelt:
- Sicherstellung der Energieversorgung
- Abschätzung des Energiebedarfs im Realtest
- Auslesen der Daten des Batteriemanagementsystems via Mikrocontroller
- Ansteuerung des Positionslichtes und des Alarmsummers via Mikrocontroller
- Programmierung der Kommunikationsschnittstelle zwischen Mikrocontroller und Hauptsteuereinheit
Das übergeordnete Ziel ist ein betriebsfertiges Boot inkl. der gesamten Verkabelung und einer gründlichen Funktionsprüfung.
Vorgehen
Die Solarzelle wird durch einen MPPT-Regler im optimalen Spannungsbereich belastet, damit ein möglichst hoher Energieertrag resultiert. Dieser lädt die Batterien, die durch das Batteriemanagementsystem (BMS) stetig überwacht werden. Die Stromversorgung ist durch Schalter trennbar sowie über Sicherungen geschützt. Durch Messungen im Realtest und das Auslesen der aktuellen Daten vom BMS kann der Energiebedarf abgeschätzt werden.
Der Mikrocontroller wird als Co-Prozessor der Hauptsteuereinheit eingesetzt, um bei einem tiefen Ladezustand der Batterie den Energiebedarf auf ein Minimum reduzieren zu können. Dafür ist ein Ruhemodus zu implementieren, bei dem die nötigsten Sicherheitsfunktionen möglich sind. Dazu gehören Positionslicht und Alarmsummer anzusteuern oder die BMS-Daten auszulesen. Der Mikrocontroller soll durch eine Geolokalisierung die Position mit dem eigenen GPS-Sensor überwachen und beim Austritt aus dem festgelegten Bereich die Hauptsteuereinheit hochfahren.
Ergebnis
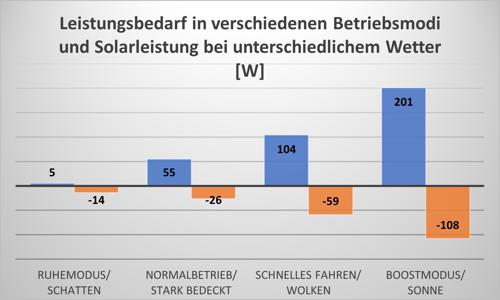
Die Inbetriebnahme und Funktionsprüfung der Bauteile war erfolgreich. Es können von der Hauptsteuereinheit aus die Batteriezustandsdaten abgefragt und der Alarmsummer und das Positionslicht angesteuert werden. Der Leistungsbedarf des Bootes und die Leistung der Solarzelle im Realtest entsprechen den Schätzungen. Der Ruhemodus konnte aus zeitlichen Gründen nicht implementiert werden.