Datenerfassung und Steuerung eines unbemannten Forschungsbootes
- Degree programme: BSc in Automobil - und Fahrzeugtechnik
- Author: Sandro Renato Capun
- Thesis advisor: Prof. Peter Affolter
- Year: 2021
Umsetzung der Steuerung und Datenerfassung des Forschungsbootes "Wall-B". Durch Integration von diversen Sensoren kann das Ökosystem des Sees erforscht werden. Antrieb- und Servomotor ermöglichen die Steuerung der Längs- und Querdynamik.
Aufgabenstellung
Ziel dieser Teilarbeit ist die Umsetzung der Fortbewegung und Datenerfassung des Bootes «Wall-B». Hierfür muss die Fernsteuerung eines Antriebs-, und eines Servomotors implementiert werden. Und um die Messwerte zu erfassen muss die Integration und Parametrierung von diversen Sensoren umgesetzt werden. Die Daten sollen zur Auswertung gesammelt und visualisiert werden.
Fernsteuerung
Die Leitstelle und die Bootssteuerung sind mittels Mobilfunknetz miteinander verbunden. Über eine TCP/IP-Socket-Schnittstelle werden die Fahrbefehle eines Gamepads von der Leitstelle an die Bootssteuerung übertragen. Diese verarbeitet anschliessend die Signale, und steuert Antriebs- und Servomotor an. Das Boot verfügt über zwei Modi während der Fahrt. Einen schnellen zur effektiven Fortbewegung, und einen langsamen, zum Durchführen von Messungen während der Fahrt.
Datenerfassung
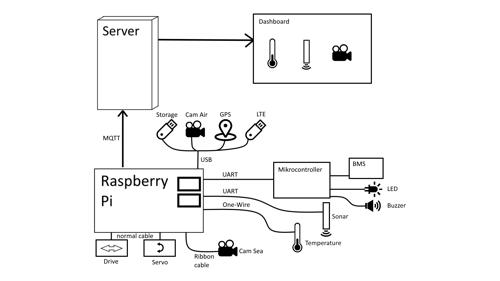
Der Prozessor ist mit sämtlichen Sensoren verbunden. Die Sensordaten werden mittels USB, UART oder One-Wire Schnittstelle ausgelesen und verarbeitet. Der Prozessor sendet die erhaltenen Informationen anschliessend an einen Server, auf welchem sie gespeichert werden. Zusätzlich befinden sich noch zwei Kameras an Board. Eine Unterwasserkamera, um Bilder vom Untergrund aufzunehmen, und eine über dem Wasserpegel, um die Umgebung zu filmen, oder die Übersicht bei der Steuerung zu verbessern.
Visualisierung
Die vom Prozessor gesammelten und gesendeten Informationen, werden auf einem Dashboard dargestellt. Sämtliche Daten können vom Server direkt in Karten, Anzeigen oder Diagrammen integriert werden. Dadurch ist es möglich alle Informationen zum Energiemanagement oder der Umwelt auf einem Bildschirm darzustellen. Zusätzlich wird noch ein Livestream der Unterwasserkamera integriert. Dadurch ist es möglich die von den Sensoren erkannten Objekte zu sehen, und diese zu klassifizieren.