Qualitätskontrolle von Uhren mittels kollaborativem Roboter
- Degree programme: BSc in Mikro- und Medizintechnik
- Author: Tim Yannis Strahm
- Thesis advisor: Prof. Dr. Gabriel Gruener
- Expert: Alain Oppliger
- Industrial partner: Sequent SA Basel
- Year: 2022
Um die korrekte Funktionsweise von Uhren der Firma Sequent SA zu gewährleisten, wird heute jede Uhr von einem Mitarbeiter oder einer Mitarbeiterin von Hand geprüft. Um diesen Prozess zu automatisieren, soll in Zukunft ein System mit einem kollaborativen Roboter eingesetzt werden. Diese Arbeit befasst sich mit der Konzeptionierung und Entwicklung eines solchen Systems.
Ausgangslage
Die Qualitätskontrolle ist ein wichtiger Prozess in der Uhrherstellung. Bei der Schlusskontrolle wird eine Uhr ein letztes Mal kontrolliert, bevor sie ausgeliefert wird. Diese Kontrolle fügt der Uhr keinen eigentlichen Wert hinzu, stellt aber einen erforderlichen Prozess dar und wird häufig manuell gemacht, was eine monotone Arbeit ist. Die Firma Sequent SA stellt hybride Smartwatches her und ist daran interessiert, wie ein Robotersystem zur Automation der Schlusskontrolle ihrer Uhren verwendet werden könnte.
Ziel
Um die Schlusskontrolle zu automatisieren, sollen verschiedene Möglichkeiten untersucht werden, wie ein kollaborativer Roboter (Cobot) diese Kontrolle der Uhren vornehmen kann. Ein solcher Cobot bietet den Vorteil, dass er neben einem Menschen arbeiten und diesen bei seinen Tätigkeiten unterstützen kann. Im vorliegenden Fall soll der Roboter selbstständig die Uhren aus ihren Lagerpaletten entnehmen und kontrollieren können. Menschliche Interaktion soll nur benötigt werden, wenn alle Uhren in den Lagerpaletten getestet sind und diese gegen neue Palette ausgetauscht werden müssen. Das ermöglicht Angestellten, sich kreativeren Aufgaben zu widmen.
Vorgehen
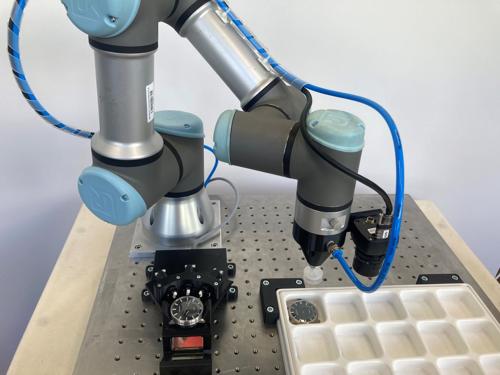
Zu Beginn wurde ein Konzept erstellt, das die Bedienung, das Handling und die optische Kontrolle der Uhr umfasst. Anschliessend wurde mit der Konstruktion der dazu notwendigen Komponenten begonnen. Dazu gehören eine Teststation und ein Greifer, welche in CAD entworfen und auf einem 3D-Drucker hergestellt wurden. Auf der Teststation sind Servomotoren verbaut, um die Kronen der Uhr drücken zu können. Um die Uhren sanft zwischen Palett und Teststation zu bewegen, wird ein Saugnapf mit Vakuum verwendet, welcher am Greifer montiert ist. Am Greifer ist auch eine Kamera befestigt, deren Bilder von der Bildverarbeitungssoftware genutzt werden, um die Position der Uhren im Palett zu finden, sowie die Uhren auf der Station optisch zu kontrollieren.
Ausblick
Um das System benutzerfreundlicher zu machen, soll ein GUI programmiert werden, um neue Uhrmodelle einzulesen und in einem Profil zu speichern. Ein solches Profil kann später erneut geladen werden und ermöglicht dem System sofort, das gewählte Uhrmodell zu kontrollieren. Ausserdem könnte die Anlage so erweitert werden, dass ein Roboter mehrere Stationen gleichzeitig bedient, um den Durchsatz zu erhöhen.