MedEvac - Prototyp zur schnellen Bergung verletzter Personen aus einer Gefahrenzone
- Degree programme: BSc in Automobil - und Fahrzeugtechnik
- Author: Fabian Däster
- Thesis advisors: Prof. Raphael Murri, Christian Schürch
- Industrial partner: RUAG AG Emmen
- Year: 2023
In unwegsamem Gelände, wo kein Zugang mit Fahrzeugen möglich ist, basiert die Bergung von verletzten Personen auf dem Einsatz von dafür geschultem Personal. Je nach Situation und Zustand des Patienten ist eine solche Rettung sehr aufwendig und zeitintensiv. Dadurch entsteht ein enormes Gefahrenpotenzial für Retter und Patienten, wenn sich diese in einer Gefahrenzone befindet.
Zielsetzung
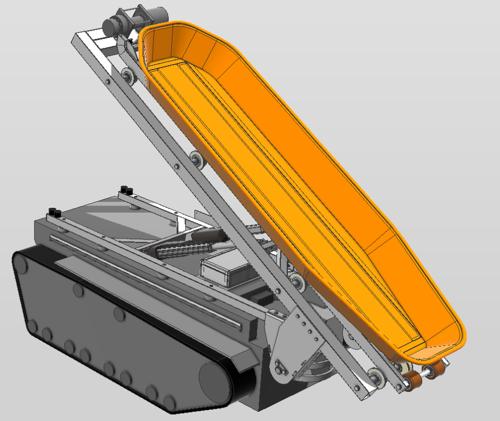
In dieser Bachelorthesis wird das System zur Patientenbergung, welches in den beiden vorangehenden Semesterarbeiten erarbeitet wurde, weiter ausgereift, konstruiert und ein Prototyp gebaut. Dieser soll als funktionsfähiger Demonstrator auf dem Roboter Garm III der RUAG AG eingesetzt werden. Die Konstruktion soll einfach und zweckmässig sein und die Anforderungen aus dem Pflichtenheft der Projektarbeit 1 erfüllen. Es wird untersucht, wie sich die Synchronisierung der beiden Linearantriebe realisieren lässt und ob der Prototyp die Funktion der Patientenbergung erfüllt.
Methodisches Vorgehen
Das Konzept aus der Projektarbeit 2 wurde im CAD konstruiert und so weit finalisiert, dass eine Festigkeitsanalyse durchgeführt werden konnte. Anhand der Resultate dieser Analyse wurde die Konstruktion überarbeitet und die Konstruktions- und Schweisszeichnungen erstellt. Die Teile wurden gemäss den Zeichnungen produziert. Die Verkabelung der elektrischen Komponenten und die Implementierung der Steuerung wurden vorgenommen. Nach dem Zusammenbau des Prototyps wurde dieser in Betrieb genommen und eine Bedienungsanleitung erstellt.
Ergebnisse
Der entwickelte Prototyp stellt eine Vereinfachung für das Rettungspersonal dar, indem die Rettung und insbesondere der Transport durch das entwickelte MedEvac-System unterstütz werden. Das Ziel einer einfachen und zweckmässigen Konstruktion wurde erfüllt. Das gesamte Gewicht des MedEvac-Systems beträgt ca. 100 kg, womit das maximale Gewicht aus dem Pflichtenheft eingehalten wird. Die Bedienung ist dank der eingesetzten Steuerung einfach gehalten und die beiden Linearantriebe werden über CANopen nach dem standardisierten Protokoll gesteuert und synchronisiert. Aufgrund der Fahrgeschwindigkeit der Linearantriebe und der Rechenzeit der Steuerung konnte eine Genauigkeit von ca. 1.0 mm erreicht werden.
Ein Einsatz ist im militärischen wie im zivilen Umfeld denkbar. Wo Gefahr besteht, dass die helfenden Einsatzkräfte ebenfalls zu Opfern werden könnten, ist eine rasche Intervention mit möglichst wenig Personal gewünscht. Genau dies wird mit dem MedEvac-System erreicht. Der gebaute Prototyp wird als Demonstrator ausschliesslich mit Dummys und aufgrund von Sicherheitsbestimmung der eingesetzten Seilwinde nicht mit Menschen verwendet.