Entwicklung eines autonomen Greiferbackenwechselsystems
- Degree programme: BSc in Mikro- und Medizintechnik
- Author: Jürg Alexander Weyermann
- Thesis advisor: Prof. Dr. Gabriel Gruener
- Expert: Christian Wyss
- Industrial partner: Auto-Mate Robotics Biel
- Year: 2024
Flexibilität ist einer der Kernaspekte bei der Evaluation von Greiferlösungen für die industrielle Robotik. Zur Optimierung dieser Anforderung in bestehenden Anwendungen wurde eine mechanische Schnittstelle entwickelt, die den autonomen Austausch der Greiffinger eines Manipulators ermöglicht. Die Eigenschaften dieses Systems wurden mit der Umsetzung einer Automatisierungsanwendung in einem Demonstrator verifiziert.
Motivation
Parallelgreifer sind als Werkzeug zur Handhabung einer Vielzahl an Objekten durch industrielle Roboter allgegenwärtig. Die flexible Abstimmung des Robotersetups erfordert oft manuelle Wechsel der Greiferbacken. Um die Interaktion zwischen Bediener und Roboter zu vereinfachen, wurde im Rahmen dieser Arbeit eine Schnittstelle entwickelt, die eine autonome Durchführung des Backenwechsels durch den Roboter ermöglicht.
Anforderungen
Wiederholgenauigkeit (+/- 0.02mm), Selbstzentrierung, Verschleisswiderstand, die flexible Konfiguration der Greiferbacken und eine kurze Wechselzeit (< 2s) wurden als zentrale Anforderungen an die Schnittstelle identifiziert. Zudem sollen Sensoren (Detektorschalter, Kraftsensoren etc.) in die Greiffinger integriert werden können. Die Funktionalität soll mit einem Demonstrator in einer Roboterzelle veranschaulicht werden.
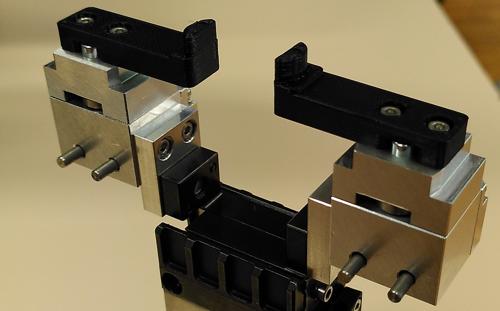
Konzept
Der entwickelte Prototyp funktioniert rein mechanisch und wurde bewusst simpel gehalten (Abb. 2). Als Aktor für die Entriegelung wird der Roboter selbst genutzt. Durch Abstimmung der Wechselstation auf den Greiferhub können beide Greiferbacken gleichzeitig ausgewechselt werden. Mit einer am Roboterarm montierten Kamera können die Greiferbacken über einen integrierten QR-Code identifiziert werden.
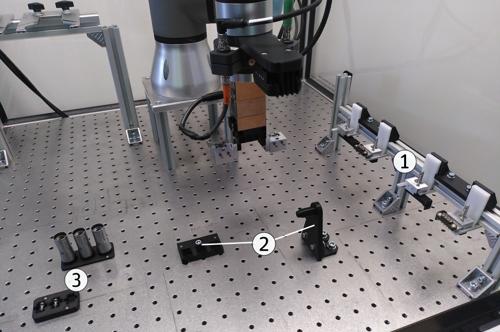
Demonstrator
In der Demonstratorzelle wurde mit einem kollaborativen Roboter (Universal Robots UR3) eine Automatisierungsanwendung umgesetzt (Abb. 1). Dabei geht es um das Einlegen verschiedener Bauteile in eine Lehre zur Lasergravur. Diese Anwendung erfordert eine flexible Neukonfiguration für unterschiedlichste Bauteile unter Beibehaltung der etablierten Parameter des Gravurprozesses, weshalb sich ein System mit austauschbaren Greiferbacken unter Verwendung desselben Greifers dafür anbietet.
Fazit und Ausblick
Durch die Umsetzung des Demonstrators konnte die Funktionalität des Systems erfolgreich aufgezeigt werden. Das entwickelte System bietet sich hauptsächlich für Anwendungen an, bei denen bauteilspezifische Geometrien der Greiferbacken notwendig sind und eine grosse Flexibilität gefordert ist. Baugrösse und Gewicht des Prototyps haben noch Reduktionspotential. Zudem kann die Positionierung der Backen in der Wechselstation verbessert werden. Der Einsatz in einer Anwendung mit höheren Zuverlässigkeitsansprüchen würde die Viabilität des Systems weiter erörtern.