Spannsystem
- Degree programme: BSc in Maschinentechnik
- Author: Marco Mauro
- Thesis advisors: Prof. Sebastian Siep, Thorsten Kramer
- Expert: Fabian Rüegg
- Industrial partner: Berner Fachhochschule Departement für Architektur, Holz und Bau Biel, Quadra Ligna AG Basel
- Year: 2021
Im Rahmen eines Forschungsprojektes der AHB – Biel, zusammen mit der Quadra Ligna AG, soll ein aktuell in Handarbeit durchgeführter Fräsprozess mithilfe eines Industrieroboters automatisiert werden. Die bereits getätigten Versuche haben dabei die Notwendigkeit eines auf den Prozess abgestimmten Spannsystems aufgezeigt. In dieser Arbeit wurde ein Konzept für eine Spannvorrichtung erarbeitet, welches den gestellten Anforderungen gerecht wird.
Ausgangslage
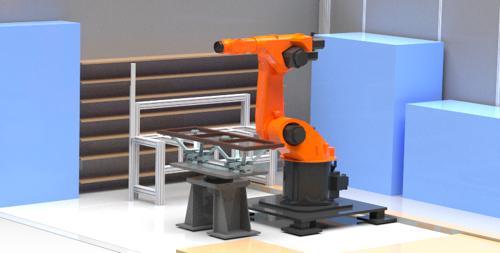
Die Quadra Ligna AG ersetzt im Zuge von Fenster-Renovationen, bestehende Gläser mit Isolierverglasungen. Dazu müssen die alten Fenstergläser mit einem horizontalen Schnitt an der Innenseite der Fenster und einem vertikalen Schnitt an dessen Aussenseite herausgetrennt werden. Um diesen Fräsprozess automatisieren zu können, soll im Rahmen eines Forschungsprojektes mit der AHB – Biel ein Industrieroboter eingesetzt werden. Damit bereits erste Versuche durchgeführt werden konnten, wurde eine provisorische Spannvorrichtung gebaut, welche jedoch nicht auf wechselnde Fenstergrössen und Formen angepasst werden kann.
Ziel
Für den bestehenden Prozessablauf mit dem Roboter sollen Ablaufvarianten mit stationärem, externem sowie teilautomatisiertem Vorbereiten der Fenster definiert und entsprechend darauf abgestimmte Konzepte für Spannvorrichtungen ausgearbeitet werden. Die entworfenen Prozessabläufe sind anschliessend bezüglich ihrer Effizienz zu bewerten und mit den entstehenden Kosten zu vergleichen. Auf Grundlage dieses Vergleiches wird eine Entscheidung zu der gewünschten Prozessvariante von den Verantwortlichen der AHB wie auch der Quadra Ligna AG getroffen. Schliesslich soll entsprechend dieser Entscheidung ein Konzept für ein Spannsystem entwickelt werden.
Vorgehen
Zu Beginn wird eine Analyse des momentan in der AHB durchgeführten Prozesses gemacht, woraus die Anforderungen an das zu entwickelnde System identifiziert werden. Auf Grundlage dieser Anforderungen werden drei verschiedene Prozessvarianten, welche unterschiedliche Automatisierungsgrade aufweisen, definiert. Zu jeder Prozessvariante sind daraufhin entsprechende Konzepte zu erarbeiten. Anschliessend werden die Konzepte bewertet und das am besten bewertete Konzept ausgearbeitet.
Ergebnisse
Durch unterschiedliche Auslegung der Arbeitsschritte der drei definierten Prozessabläufe, konnten Möglichkeiten aufgezeigt werden, den Bearbeitungsprozess bis zu 40 % effizienter zu gestalten. Zudem wurden entsprechende Spannsystem-Konzepte erstellt, deren Kostenaufwände zusammengetragen und den Verantwortlichen für eine Entscheidung vorgelegt.
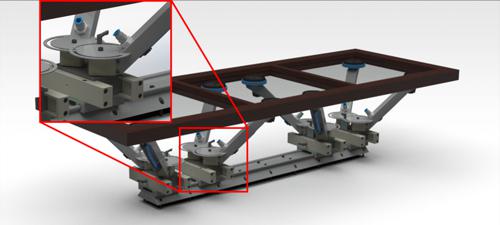
Das als Ergebnis vorliegende Gesamtkonzept für ein Spannsystem unterstützt ein stationäres Vorbereiten der Fenster in der Roboterzelle und kann auf die wechselnden Fenstergrössen und Formen angepasst werden. Des Weiteren wird das Ausrichten der Fenster mithilfe von translativen und rotativen Achsen des Spannsystems begünstigt. Um die Fenster während der Bearbeitung zu fixieren, wird ein pneumatisches Unterdrucksystem mit Vakuumsaugern eingesetzt. Basierend auf dem erstellten CAD-Modell, kann schliesslich ein Prototyp gebaut und getestet werden.